参考自实习的同事的工作日志
系统准备
使用 distrobox 创建容器,搞坏了直接删了完事
1
| distrobox create --name ubuntu --image docker.xuanyuan.me/ubuntu:24.04 --home /home/sub/ubuntu --hostname ubuntu
|
软件包安装
参考链接 官方文档
设置 locale
1
2
3
4
| sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
|
设置软件源
1
2
3
4
5
6
7
| sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F'"' '{print $4}')
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo ${UBUNTU_CODENAME:-${VERSION_CODENAME}})_all.deb"
sudo dpkg -i /tmp/ros2-apt-source.deb
|
安装 ROS 2 和 moveit
1
2
| sudo apt update
sudo apt install ros-jazzy-moveit ros-jazzy-moveit
|
激活环境
1
| source /opt/ros/jazzy/setup.bash
|
安装 moveit2_tutorials
apt源没有 moveit2_tutorials,需要自己从源码编译
前置软件包
需要 rosdep 来解决依赖
rosdepc 为 rosdep 的包装,下载加速用
我直接安装会被系统禁止,经过ai提醒可以用 pipx 自动创建虚拟环境
1
2
3
4
5
6
7
8
| pipx install rosdepc rosdep --pip-args="-i https://pypi.tuna.tsinghua.edu.cn/simple"
sudo env PATH="$PATH:/home/$USER/.local/bin" rosdepc
sudo rosdep init rosdep update
sudo apt update
sudo apt dist-upgrade
|
1
2
3
4
5
6
| sudo apt install python3-colcon-common-extensions
sudo apt install python3-colcon-mixin
colcon mixin add default https://raw.githubusercontent.com/colcon/colcon-mixin-repository/master/index.yaml
colcon mixin update default
sudo apt install python3-vcstool
|
拉取源码
参考 moveit2_tutorials README 注意版本是 jazzy
1
2
3
4
5
| mkdir -p ~/ws_moveit2/src
cd ~/ws_moveit2/src
git clone https://github.com/ros-planning/moveit2_tutorials.git
vcs import < moveit2_tutorials/moveit2_tutorials.repos
sudo apt update && rosdep install -r --from-paths . --ignore-src --rosdistro jazzy -y
|
编译
1
2
3
|
cd ../
colcon build --mixin release
|
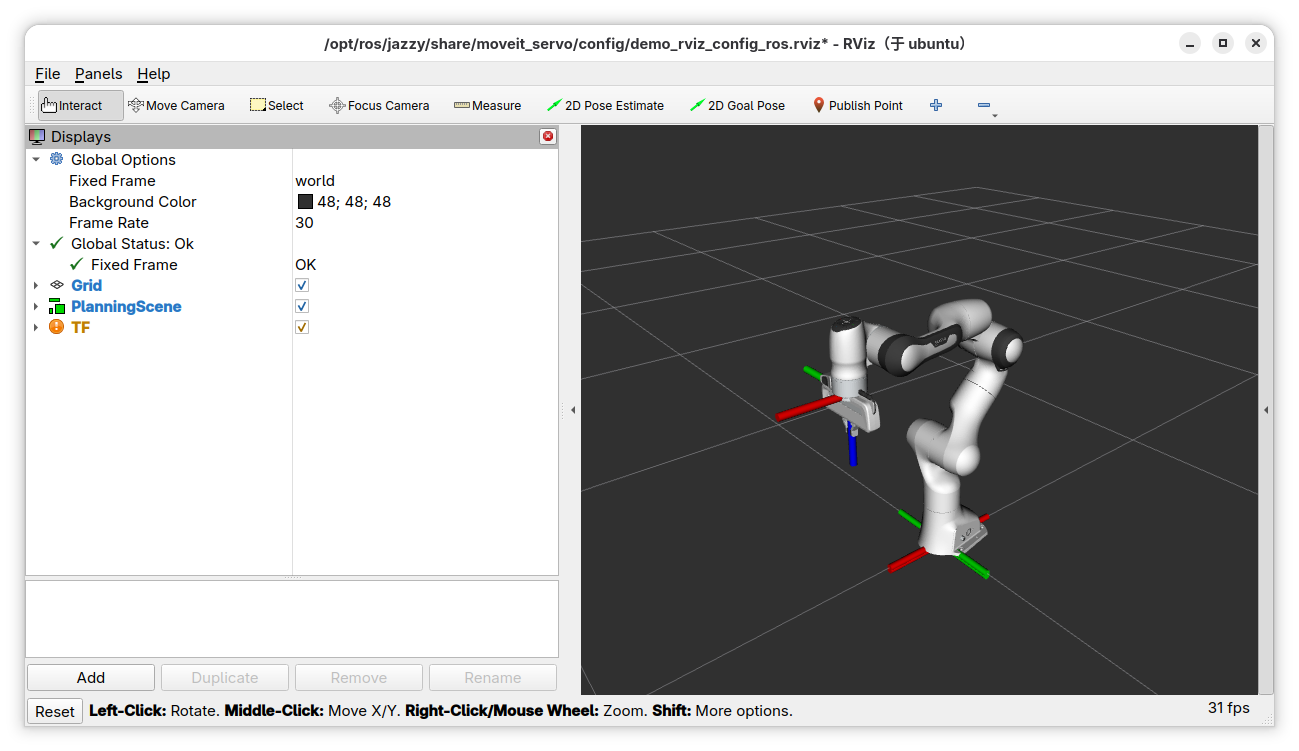
完成
如果一切正常,测试一下功能
1
2
3
4
5
6
7
| source /opt/ros/jazzy/setup.bash
source ~/ws_moveit2/install/setup.bash
ros2 launch moveit_servo demo_ros_api.launch.py
ros2 run moveit_servo servo_keyboard_input
|
非常的完美